# SensorCommunity Binding

Binding for the Sensor.Community (opens new window). The community provides instructions to build sensors on your own and they can be integrated into the database. With this binding you can integrate your sensor, a sensor nearby or even any sensors you want into openHAB.
# Supported Things
Following sensor things are supported
| Name | Thing Type ID | Description |
|---|---|---|
| Particulate Sensor | particulate | Sensor to measure Particulate Matter (PM) |
| Conditions Sensor | conditions | Sensor to measure Temperature and Humidity conditions |
| Noise Sensor | noise | Sensor to measure noise on location |
| Radiation Sensor | radiation | Sensor to measure radiation on location |
# Discovery
There's no auto discovery. See Thing configuration how to setup a Sensor.
# Thing Configuration
Choose either a local IP address of your personal owned sensor or a sensor id of an external one.
| Parameter | Description | Default |
|---|---|---|
| ipAddress | Local IP address of your personal owned sensor | N/A |
| sensorid | Sensor ID obtained from https://deutschland.maps.sensor.community/ (opens new window) | N/A |
| conversionFactor | Sensor specific conversion factor to transform counts per minute to Sievert | 0.00136 |
conversionFactor is only relevant for radiation sensors to convert the decay count per minute into Sievert per hour.
Default value fits to EcoCurious Si22G.
Check your datasheet and configure it if needed.
# Local Sensor
Please check in your browser if you can access your sensor with your local IP address.
# External Sensor
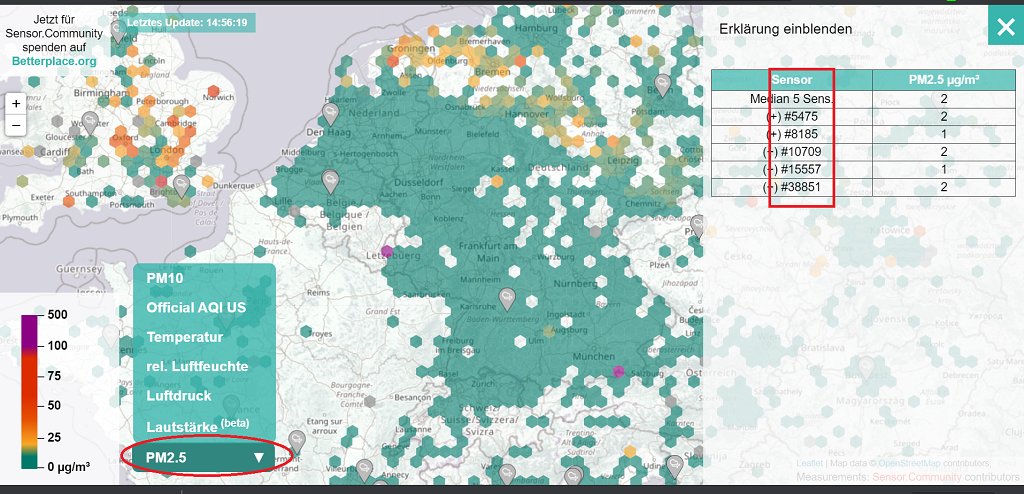
Perform the following steps to get the appropriate Sensor ID
- Go to to Sensor.Community map (opens new window)
- Choose your desired value in bottom list - now only the Sensors are displayed which are supporting this
- Click on your / any Sensor and the ID is displayed in the top right corner. Note: Sensor ID is just the number without beginning hash #
- Enter this Sensor ID into the Thing configuration
# Channels
# Particulate Sensor
| Channel ID | Item Type | Description |
|---|---|---|
| pm25 | Number:Density | Ultrafine particulates (opens new window) microgram per cubic meter |
| pm100 | Number:Density | Coarse particulate matter (opens new window) microgram per cubic meter |
# Conditions Sensor
| Channel ID | Item Type | Description |
|---|---|---|
| temperature | Number:Temperature | current temperature |
| humidity | Number:Dimensionless | current humidity percent |
| pressure | Number:Pressure | Atmospheric Pressure (not supported by all sensors) |
| pressure-sea | Number:Pressure | Atmospheric Pressure on sea level (not supported by all sensors) |
# Noise Sensor
| Channel ID | Item Type | Description |
|---|---|---|
| noise-eq | Number:Dimensionless | Average noise in db |
| noise-min | Number:Dimensionless | Minimum noise covered in the last 2.5 minutes in db |
| noise-main | Number:Dimensionless | Maximum noise covered in the last 2.5 minutes in db |
# Radiation Sensor
| Channel ID | Item Type | Description |
|---|---|---|
| radiation | Number:RadiationDoseRate | Radiation measure in micro-Sievert per hour |
| radiation-level | Number | Severity level of radiation dose |
| counts-per-minute | Number | Number of decay events in one minute |
| hv-pulses | Number | Number of high voltage pulses in measurement period |
The radiation level shows 5 severity levels
- 0 = Normal (radiation < 0.15 μSv/h)
- 1 = Elevated (radiation < 0.4 μSv/h)
- 2 = High (radiation < 1 μSv/h)
- 3 = Action Level (radiation < 100 μSv/h)
- 4 = Dangerous (radiation >= 100 μSv/h)
The hv-pulses shows the high voltage pulses generated by the sensor in the last measurement period.
If these values are deviating too much from period to period it's an indication of a hardware problem.
# Full Example
# Things
sensorcommunity.things
Thing sensorcommunity:particulate:pm_sensor "PM Sensor" [ ipAddress=192.168.178.50 ]
Thing sensorcommunity:conditions:cond_sensor "Condition Sensor" [ sensorid=28843 ]
Thing sensorcommunity:noise:noise_sensor "Noise Sensor" [ sensorid=39745 ]
# Items
sensorcommunity.items
Number:Density PM_25 "PM2.5" { channel="sensorcommunity:particulate:pm_sensor:pm25" }
Number:Density PM_100 "PM10" { channel="sensorcommunity:particulate:pm_sensor:pm100" }
Number:Temperature LDI_Temperature "Temperature" { channel="sensorcommunity:conditions:cond_sensor:temperature" }
Number:Dimensionless LDI_Humidity "Humidity" { channel="sensorcommunity:conditions:cond_sensor:humidity" }
Number:Pressure LDI_Pressure "Atmospheric Pressure" { channel="sensorcommunity:conditions:cond_sensor:pressure" }
Number:Pressure LDI_PressureSea "Pressure sea level" { channel="sensorcommunity:conditions:cond_sensor:pressure-sea" }
Number:Dimensionless LDI_NoiseEQ "Noise EQ" { channel="sensorcommunity:noise:noise_sensor:noise-eq" }
Number:Dimensionless LDI_NoiseMin "Noise min" { channel="sensorcommunity:noise:noise_sensor:noise-min" }
Number:Dimensionless LDI_NoiseMax "Noise max" { channel="sensorcommunity:noise:noise_sensor:noise-max" }
# Sitemap
SensorCommunity.sitemap
sitemap SensorCommunity label="SensorCommunity" {
Text item=PM_25 label="Particulate Matter 2.5 [%.1f %unit%]"
Text item=PM_100 label="Particulate Matter 10 [%.1f %unit%]"
Text item=LDI_Temperature label="Temperature [%d %unit%]"
Text item=LDI_Humidity label="Humidity [%d %unit%]"
Text item=LDI_Pressure label="Atmospheric Pressure [%d %unit%]"
Text item=LDI_PressureSea label="Atmospheric Pressure sea [%d %unit%]"
Text item=LDI_NoiseEQ label="Noise avg [%.1f %unit%]"
Text item=LDI_NoiseMin label="Noise min [%.1f %unit%]"
Text item=LDI_NoiseMax label="Noise max [%.1f %unit%]"
}